ug10.0做复合运动仿真
1、复合运动仿真需要用函数控制其运动形态,所以首先要做函数


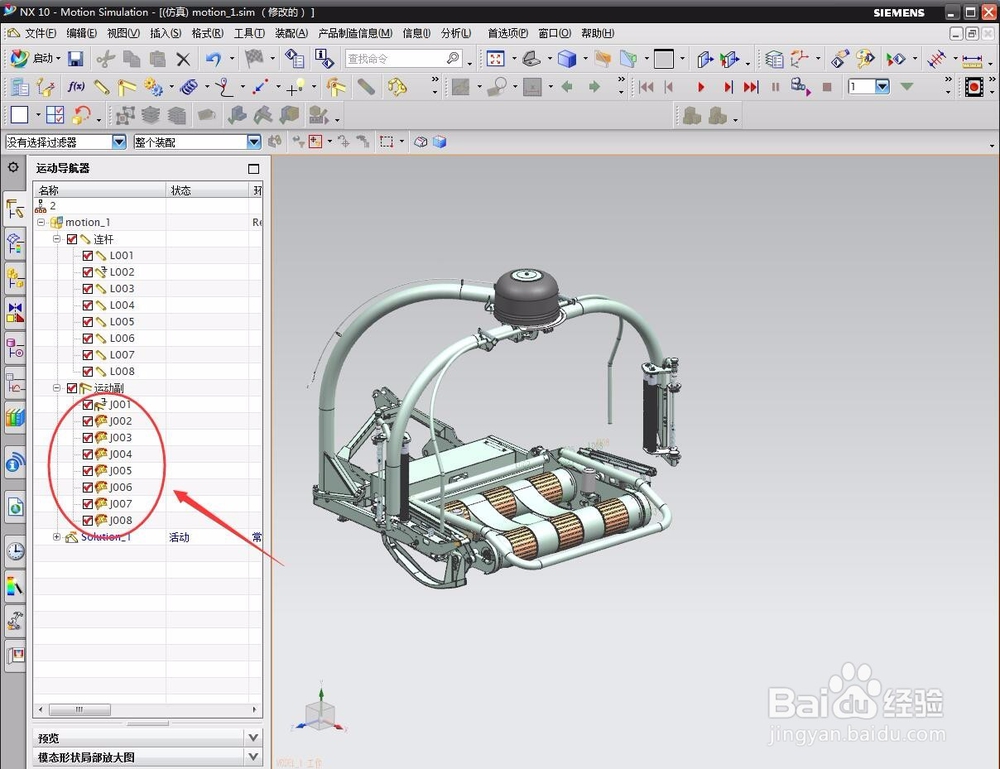
2、首先将模型分为下图8个连杆
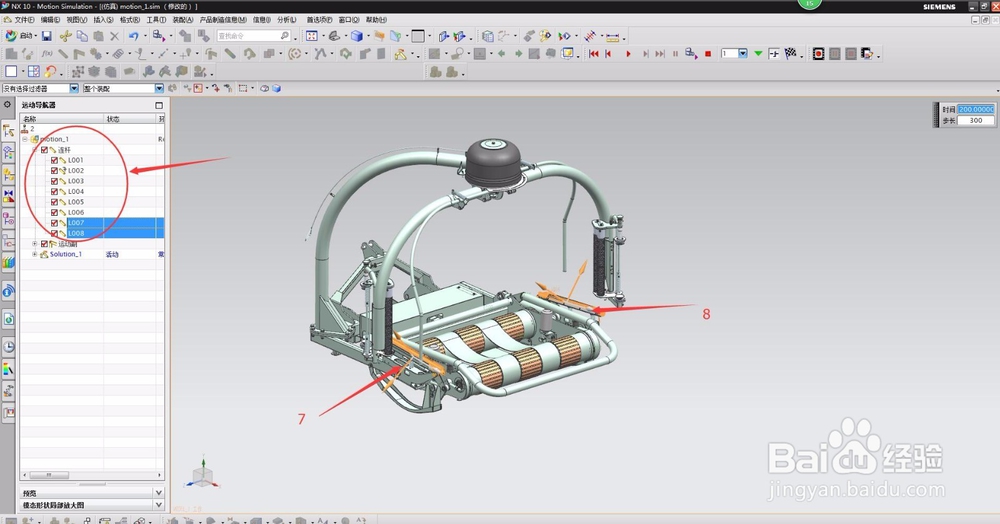



3、固定连杆L002

4、其余连杆创建旋转副

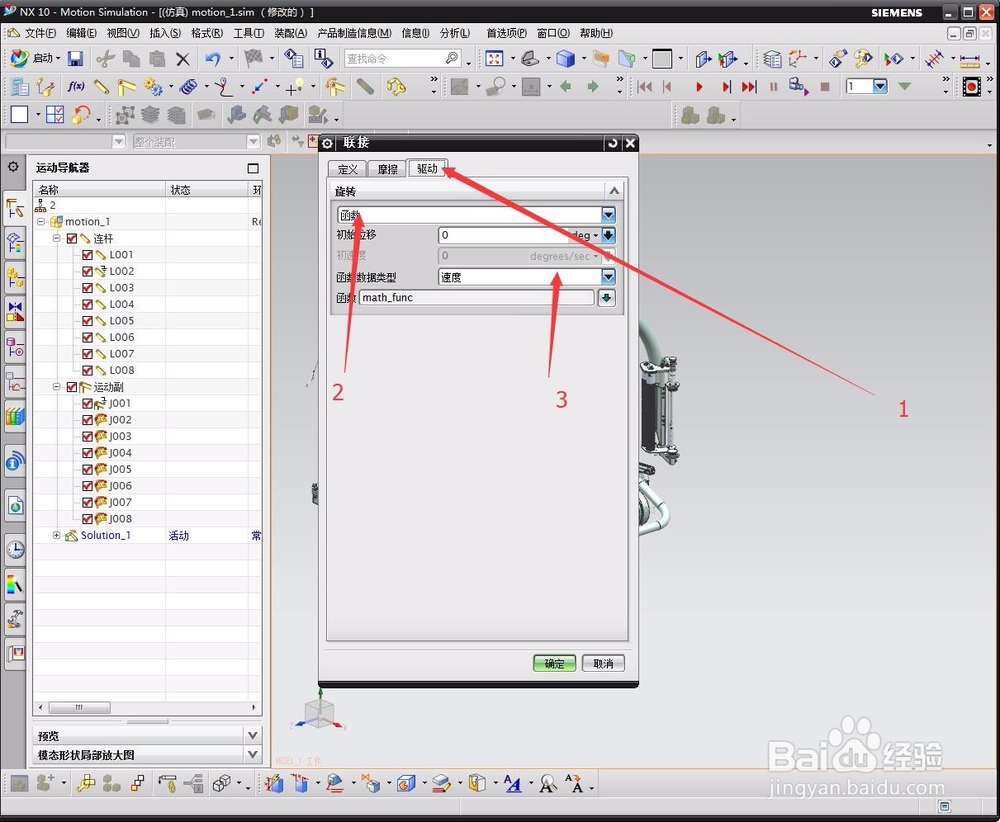
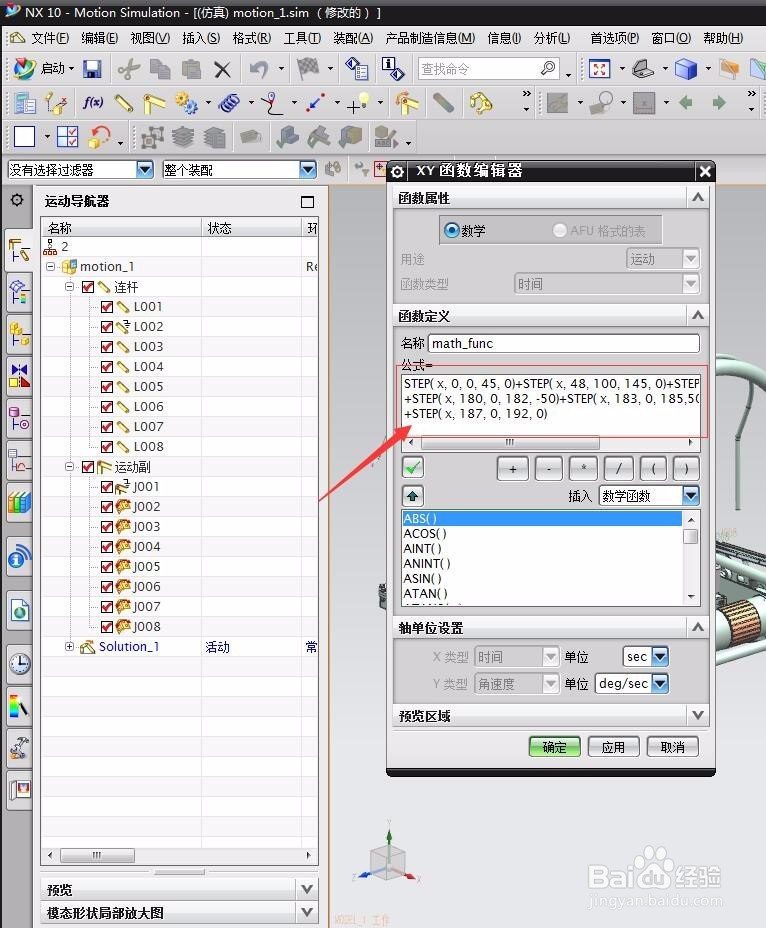
5、J002添加函数驱动
STEP( x, 0, 0, 45, 0)+STEP( x, 48, 100, 145, 0)+STEP( x, 148, -100, 150, 0)
+STEP( x, 180, 0, 182, -50)+STEP( x, 183, 0, 185,50)
+STEP( x, 187, 0, 192, 0)
6、J003、J004添加函数
STEP( x, 0, 0, 45, 0)+STEP( x, 48, 100, 145, 0)+STEP( x, 148, -100, 150, 0)
+STEP( x, 180, 0, 182, -50)+STEP( x, 183, 0, 185,50)
+STEP( x, 187, 0, 192, 0)

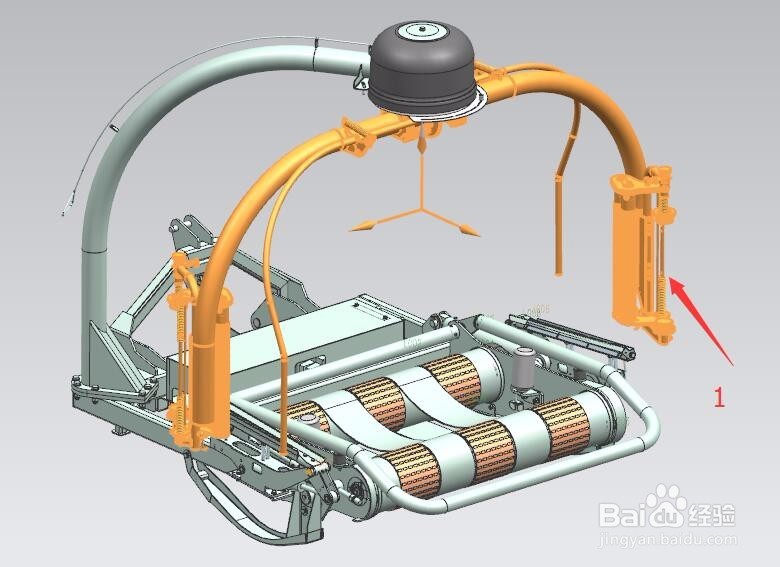
7、J005添加函数
STEP( x, 0, 0, 2, 0)+STEP( x, 7, 20, 10, 0)+STEP( x, 15, 60, 20, 0)
+STEP( x, 25, -30, 30, 0)+STEP( x, 35, -50, 40, 0)

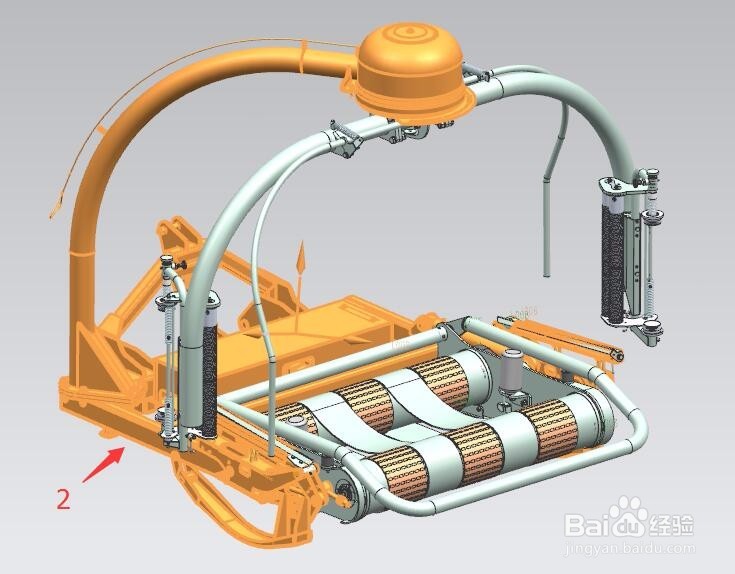
8、J006添加函数
STEP( x, 0, 0, 5, 0)+STEP( x, 15, 100, 17, 0)+STEP( x, 20,-30, 22, 0)+STEP( x, 38,-70, 40, 0)

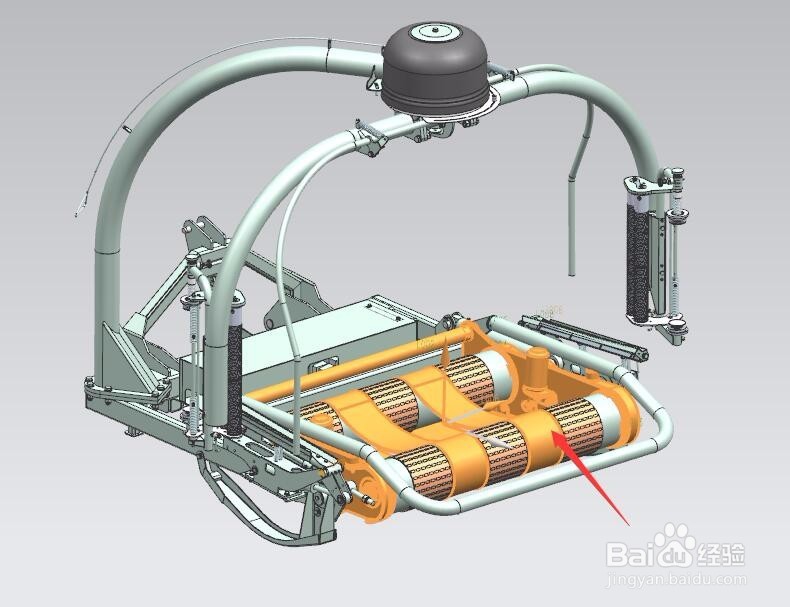
9、J007和J008 同上面步骤添加相同函数
STEP( x, 0, 0, 82, 0)+STEP( x,85, 20, 86, 0)
+STEP( x, 87, -20, 88, 0)+STEP( x, 100, 0, 102,-20)
+STEP( x, 103, 0, 104, 20)+STEP( x, 105, 0, 150, 0)
+STEP( x, 152, 80, 190, 0)+STEP( x, 192, -80, 193,0)
建立结算方案
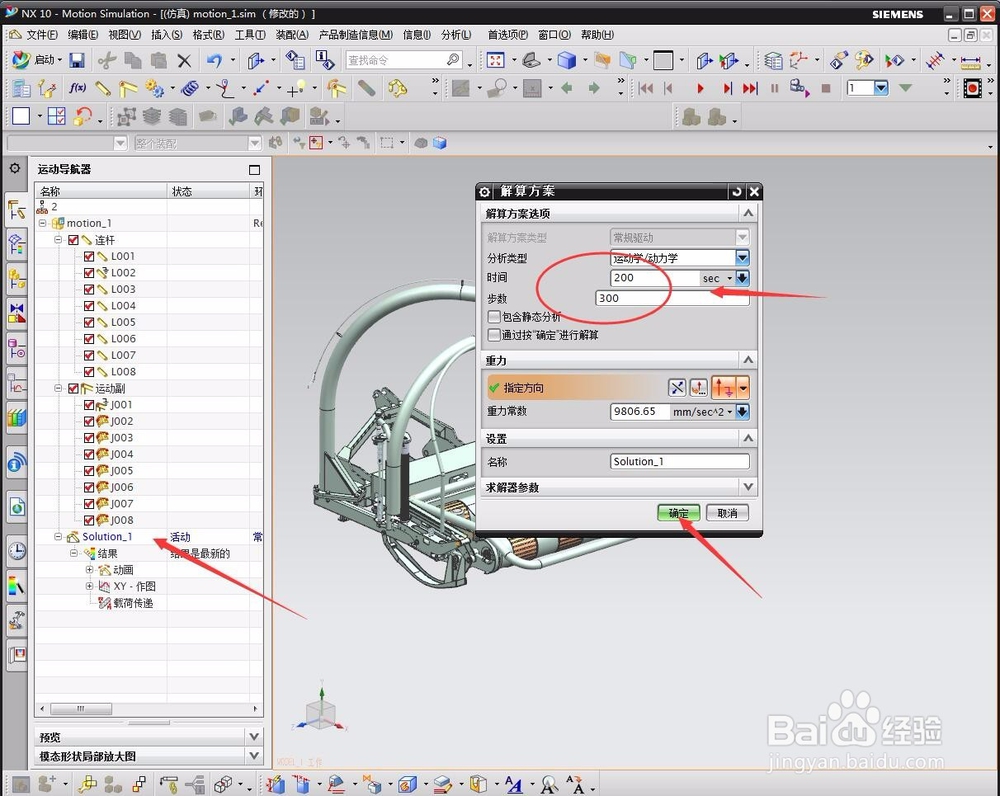
10、最后查看运动仿真

