K01弧形板打磨
1、【工作站搭建】
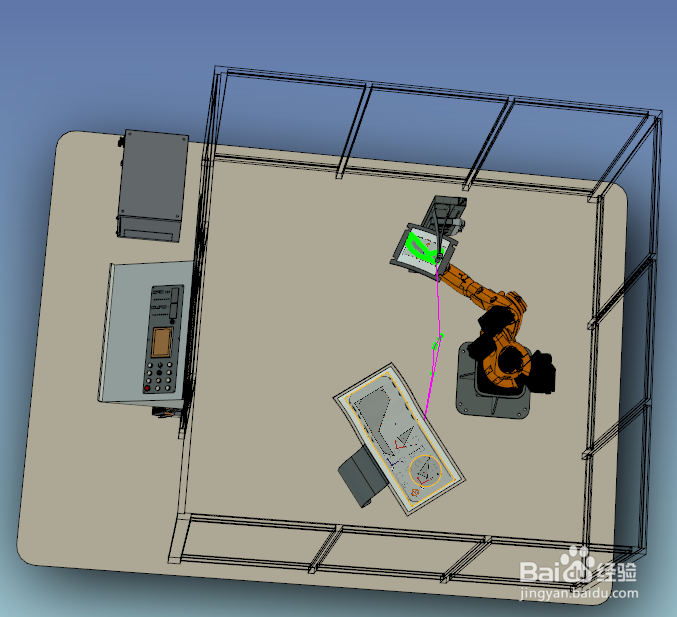
工作站搭建是导入机器人工作需要的模型,在这个工作站中需要护栏,机器人,工具,零件,工作台等模型。导入护栏,护栏属于零件,点击【场景搭建】模块中的【导入零件】按钮,在弹出的选项中选择【护栏】零件,导入零件后,会在【机器人加工管理】面板中零件下多一个名为【护栏】的零件,导入机器人导入底座,导入工具,导入工作台,工作台属于零件,在【场景搭建】中点击【导入零件】按钮,选择RobotArt_K01工作站工作台.ics,
工作站的结果如图所示:

2、【轨迹设计】
本案例中机器人的工作路径为主要分为四部分,一:机器人从停留的位置home1点-抓取弧形板。二:机器人抓取弧形板-外部工具位置。三:弧形板在外部工具开始打磨。四:弧形板打磨完毕的位置-放回弧形板-机器人回到home2点。
生成路径1
在绘图区选中工具,激活三维球,固定X轴,向右移动485mm,如图所示:

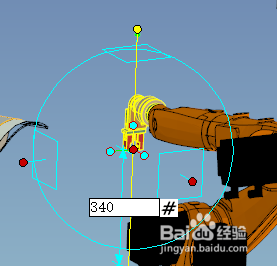
3、点击【键盘】上的【Enter】,关闭三维球,接下来插入home1点,在【机器人加工管理】控制面板中,工具:夹具上右击或者在绘图区工具上直接右击,然后选择【插入POS点】。并且重命名为【home1】,
固定Z轴,向下移动,340mm,如图所示:
4、选中工具,右击选择【插入Pos点】,并且重命名为【过渡点1】,固定Y轴,向左移动55mm,插入pos点,重命名为【过渡点2】,
选中工具。激活三维球,右击三维球中心,选择【到点】,弧形板小方块上的一点,具体位置如图所示:

5、点击【键盘】上的【空格键】,三维球变白,编辑三维球的位置,右击中心点选择【到点】,到点的位置如图所示:
6、到工具抓爪的位置后,点击【键盘】上的【空格键】,三维球变蓝,编辑三维球的位置,右击中心点选择【到点】,到点的位置如图所示:

7、到点后,右击绿色的短炳,选择【与面垂直】,选择滑块上的。如图所示:
8、右击【弧形板】选择【抓取工件】,在弹出的选项框中,勾选不生成出入到点,然后选择确认,即可完成抓取点。
【生成路径2】
路径2是从抓取工件-外部工具位置
在【机器人加工管理】加工管理面板中【轨迹】下,右击【过渡点1】选择【复制轨迹】,将复制的轨迹重命名为【过渡点4】,在【过渡点2】选择【复制轨迹】,将复制的轨迹重命名为【过渡点3】,
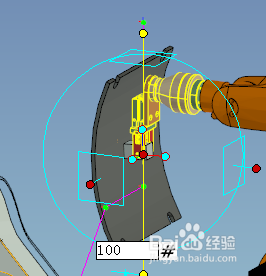
选中工具,激活三维球,固定Z轴向上移动100mm,如图所示:
9、
关闭三维球,右击【工具】选择【插入Pos点】,重命名为【过渡点5】,在【过渡点5】的基础上向上移动211mm,同时固定Y轴,顺时针旋转90度,在【工具】上右击,选择【插入Pos点】重命名为【过渡点6】。
【生成路径3】
路径3是生成弧形板打磨轨迹
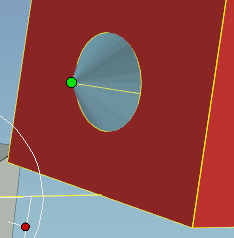
在【基础编程】工具栏中,点击【生成轨迹】按钮,生成轨迹类型选择【曲线特征】,在拾取元素中,先选择【线】,呈现绿色的高亮显示,如图所示:
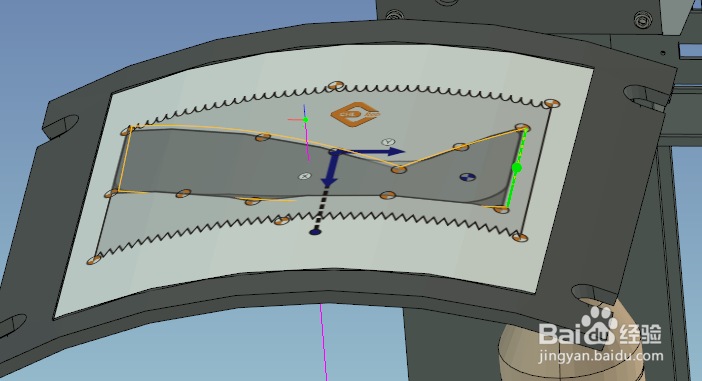
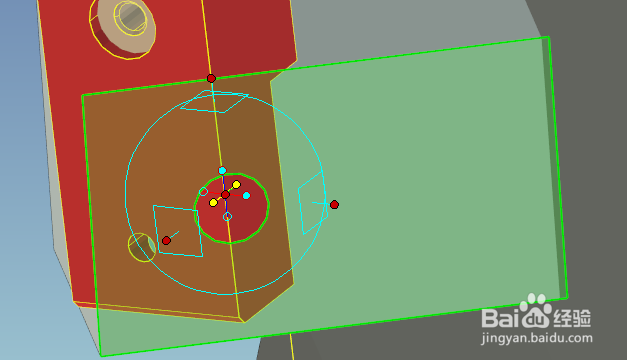
10、选择弧形板面,弧形板的面高亮显示时,处于选中状态,接着选择【零件/装配】,点击一下弧形板即可,元素已拾取完毕,接着点击完成按钮,即轨迹属性右上角的绿色“对勾”,轨迹生成已完成。
在轨下,默认的会生成三条轨迹,根据默认生成的轨迹,可知生成轨迹的顺序不是按弧形板内环,形成的闭环我,而是有间断的跳变,因此,需要调整轨迹的顺序,首先选中第三条轨迹,右击选择【轨迹反向】,则第三条轨迹的起始点为轨迹的终点,接下来,选中最后一条轨迹,右击选择【上移一个】。方便轨迹优化,将生成的三条轨迹合并在一起,弧形板上生成的第二条轨迹右击,选择【合并至前一条轨迹】。在最后一条轨迹上右击,选择【合并至前一条轨迹】,则三条轨迹合并成第一条轨迹。并且重命名为K01弧形板打磨-工作轨迹。
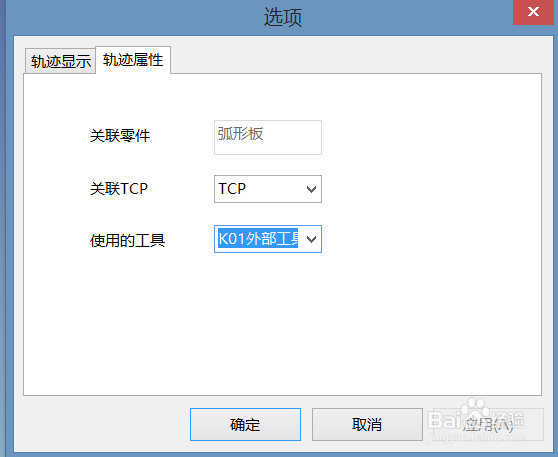
【设置轨迹与外部工具关联属性】
在【机器人加工管理】控制面板中,右击选择【属性】,在属性对话框中选择【轨迹属性】,关联零件:默认的弧形板。关联TCP:默认的TCP.使用过的工具:选择K01外部工具,点击确定。如图所示:
11、【轨迹优化】
在【机器人加工管理】控制面板中,轨迹下右击【K01弧形板打磨-工作轨迹】选择【轨迹优化】,在轨迹优化面板中选择【开始计算】,将紫色线与黄色区域分离开,点击【刷新调整】,如果紫色的线与黄色区域还有交集,重新选择【开始计算】,然后再将紫色线与黄色区域分离开,点击【刷新调整】,直到紫色线与黄色区域没有交集,点击【确认调整】。即可完成轨迹调整。
生成路径4
在【机器人加工管理】控制面板中,右击【过渡点6】,选择复制轨迹,重命名为【过渡点7】,右击【过渡点5】,选择复制轨迹,重命名为【过渡点8】,再右击【过渡点4】,选择复制轨迹,重命名为【过渡点9】,右击【过渡点3】选择复制轨迹,重命名为【过渡点10】,操作的重命名方便管理。轨迹点名字可以任意选取。
双击【抓取点】,在打开的对话框中,右击【Pick_Point1】,选择运动到点,在【机器人加工管理】控制面板中,右击【零件】下的弧形板,选择【放开工件】,在弹出的偏移量设置界面,勾选不生成出入刀点,点击确认。右击轨迹下名为【home1】的点,选择复制轨迹,生成的轨迹点重命名为【home2】。
【虚拟仿真】
仿真
在【基础编程】中点击【仿真】按钮,可以查看生成的轨迹是否使按照设定的路径及机器人的姿态。如图所示

12、当点击仿真按钮后,RobotArt界面中的其它按钮会变成灰色,此时只有仿真控制面板生效。其它的按钮都不起作用,当关闭仿真控制面板后,其它按钮又可以正常工作。仿真控制面板如图所示:
13、【设定速度】
仿真时,由于过渡点的间距比较大,弧形板上轨迹点比较密,可以看到机器人在走过渡点速度与在弧形板打磨两者之间的速度设定机器人运动速度差别很大,在过渡点处比较慢,而在弧形板打磨处速度比较快,两者差别很明显,接下来设置一下速度,在仿真的过程中保持和谐,操作步骤如下:
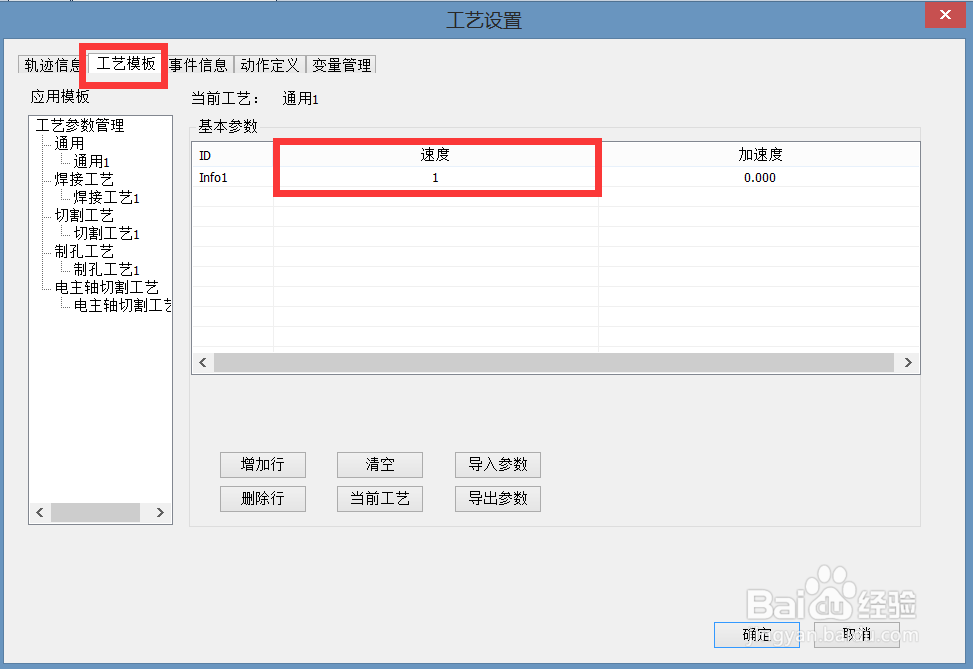
在【高级编程】工具栏中,选择【工艺设置】,如图所示:

14、在弹出的工艺设置对话框中选择【工艺模板】,双击【速度】,修改为1,加速度选择默认的零,点击确定,结果如图所示
15、选择【轨迹信息】,在轨迹点00001一栏中双击【应用模板】,在下拉三角按钮,选择Info1,轨迹信息中的Point下对应的为【机器人加工管理】下轨迹的序号,如图所示:

16、过渡点的速度都设置为1,在本例中点的序号分别为00002-00008,00082-00087。
【 RobotArt后置代码】
仿真结束后,如果轨迹符合我们,接下来可以输出后置,即机器人可以识别的代码。
生成后置代码,在RobotArt离线编程软件中生成一条轨迹并仿真无异常后,可以将轨迹生成后置代码以便能够在真机上运行,达到最终的目的。