Matlab如何表示四元数
1、本调用格式:其中q为四元数,r1-r3为欧拉角,s为欧拉转序。输出的欧拉角单位是弧度。
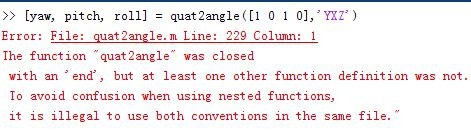
2、欧拉角的定义有很多种,应用在不同的领域。确切点说,一共有12种定义第一次旋转可以绕任何一个坐标轴进行,第二、第三次旋转要绕除上一次旋转之外的另外两个坐标轴。
3、共可以有12种定义。quat2angle支持这全部12种定义,并以三次旋转的坐标轴表示,例如'ZYX', 'ZYZ', 'ZXY',等等。默认的转序是ZYX。

4、插值公式可以从运动捕获数据中提取关键帧中找到,球面线性插值,程序考虑了p、q点乘结果为负的情况,返回的插值结果是r 。
5、用点乘计算两个四元数夹角的cos值,如果点乘为负,则反转一个四元数以取得短的4D弧。

6、检查他们是否接近,以避免除零去插值精度,即需要分别在哪一部分插值的时候就是夹角为0,重合 。

阅读量:133
阅读量:152
阅读量:170
阅读量:76
阅读量:79