电风扇360度内摇头调节装置
1、AS5040 旋转编码器把圆周分成1024 份,当转离初始位置后,PWM_LSB 端输出PWM 脉冲。在0 位置处,对应高电平宽度为1us,位置每加1,PWM 高电平脉宽相应增加1us。通过对电机PWM 的控制可以控制电机的转动,而AS5040 旋转编码器随电机转轴转动,可以根据LSB端口输出脉冲计数得出电风扇摇头的速度变化,通过检测PWM_LSB 输出脉冲可以得出此时刻转动的位置。

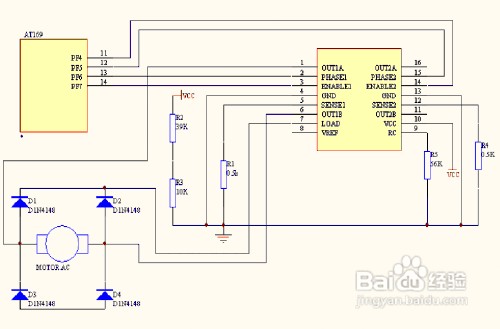
2、AVR 单片机169 输出的脉宽调制( PWM) 信号需经过功率放大才能驱动电机,调速控制
3966 驱动系统采用的是3966 驱动芯片, 双极性工作方式是指在一个PWM 周期内电机电枢两端的电压呈正负变化,系统采用的双极性PWM控制,采用PI控制算法进行速度调节。单片机PWM引脚PF7直接接电机的ENABLE端,它控制着电机的转速的大小。
3、在主程序的循环中,单片机系统自行给定, 获得电机转动的命令字,包括控制电机的速
度和转动方向及转动位置。调用读旋转编码器模块,获得电机的实际转速和转动位置,把给定速度与实际速度作差,得出控制量偏差;把给定的位置与实际位置进行比较作差,得出位置偏差。然后,调用PI控制算法模块控制电风扇的转速。若定时到了,调用PWM 驱动模块,驱动电机,形成控制系统的速度闭环。
阅读量:41
阅读量:142
阅读量:187
阅读量:133
阅读量:49