怎么在MATLAB上面创建三连杆结构
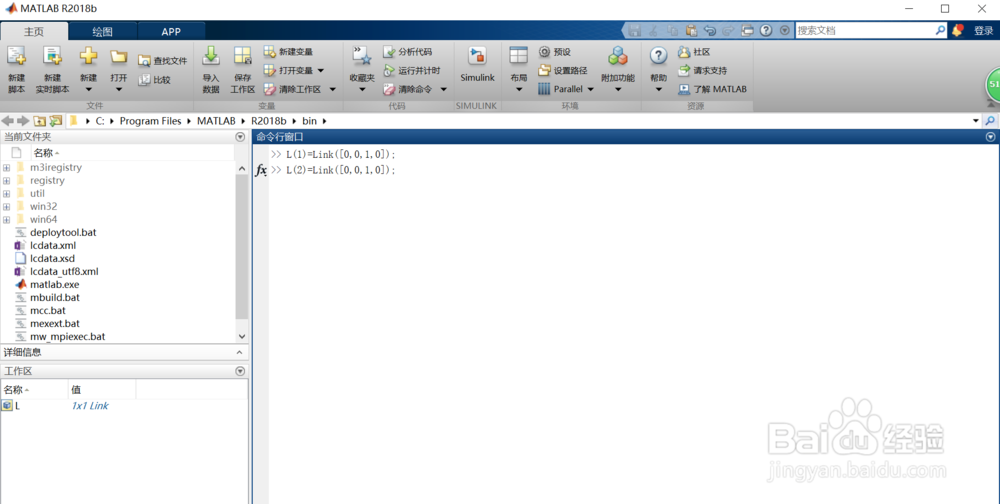
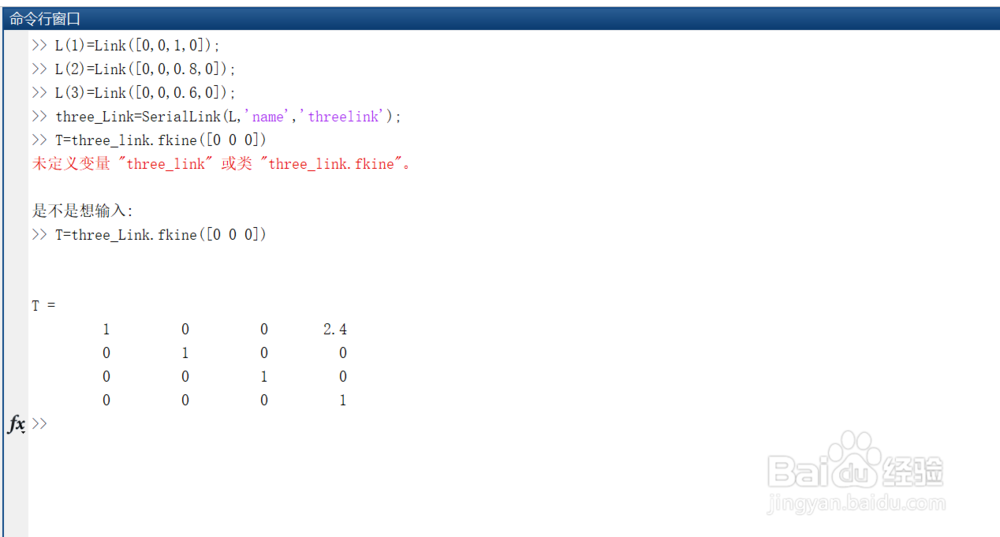
1、首先在命令行窗口输入连杆Link。
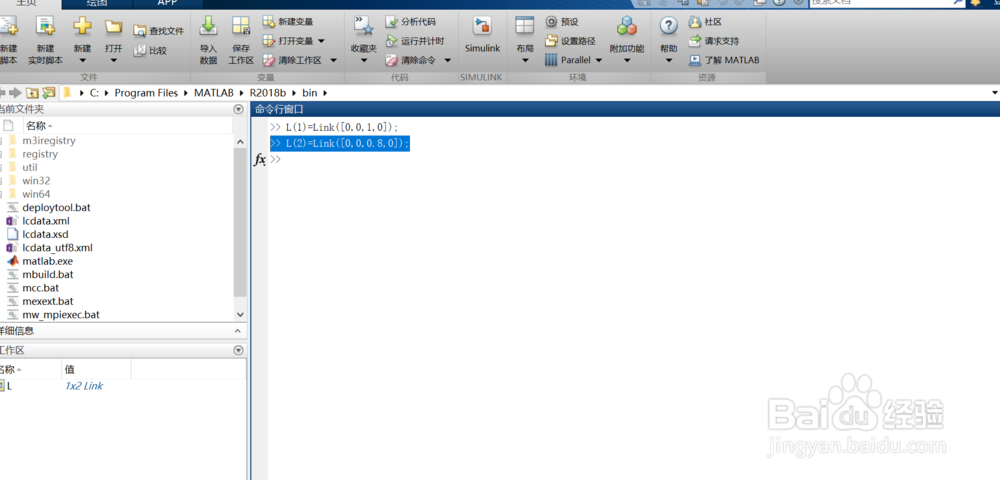
2、接着复制第二行。
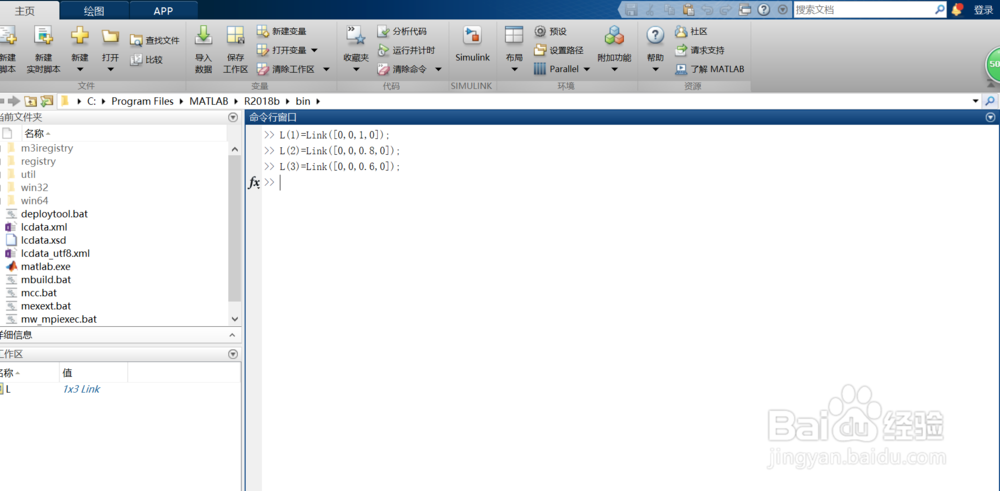
3、黏贴,然后将连杆长度修改为0.6。
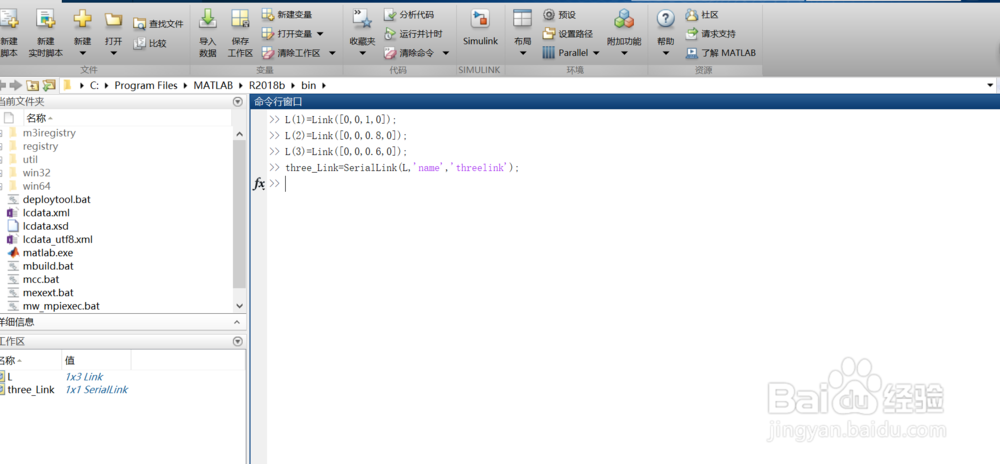
4、输入三连杆的名字。
5、三连杆为初始状态。

6、在MATLAB上面计算出齐次坐标。
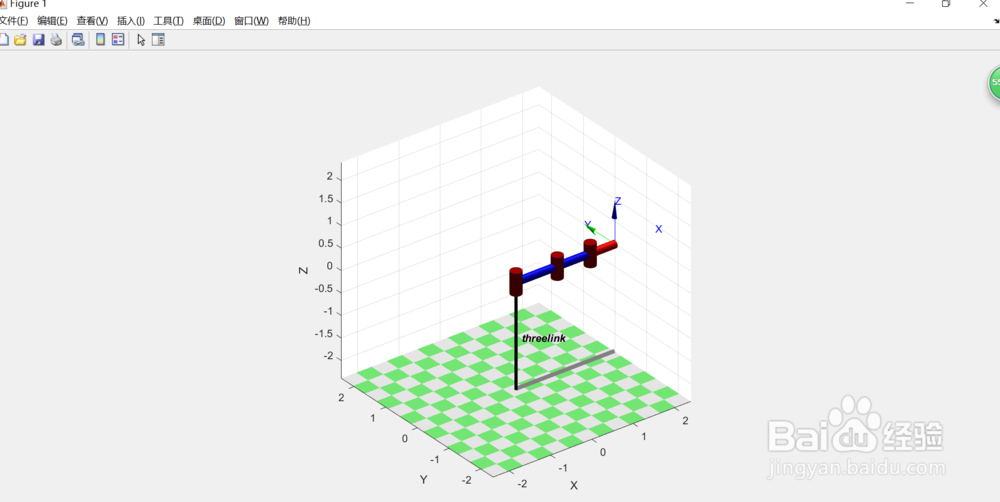
7、绘制出图形来。
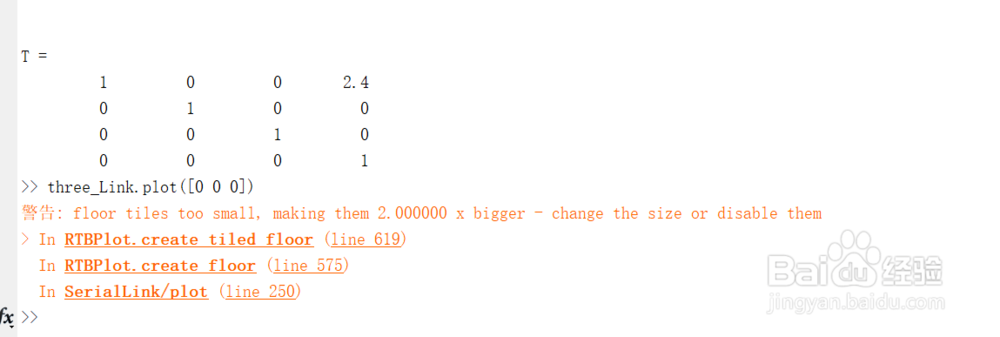
8、三连杆初始状态图如下图所示。
9、改变关节角度,分别为[0 30 40]。
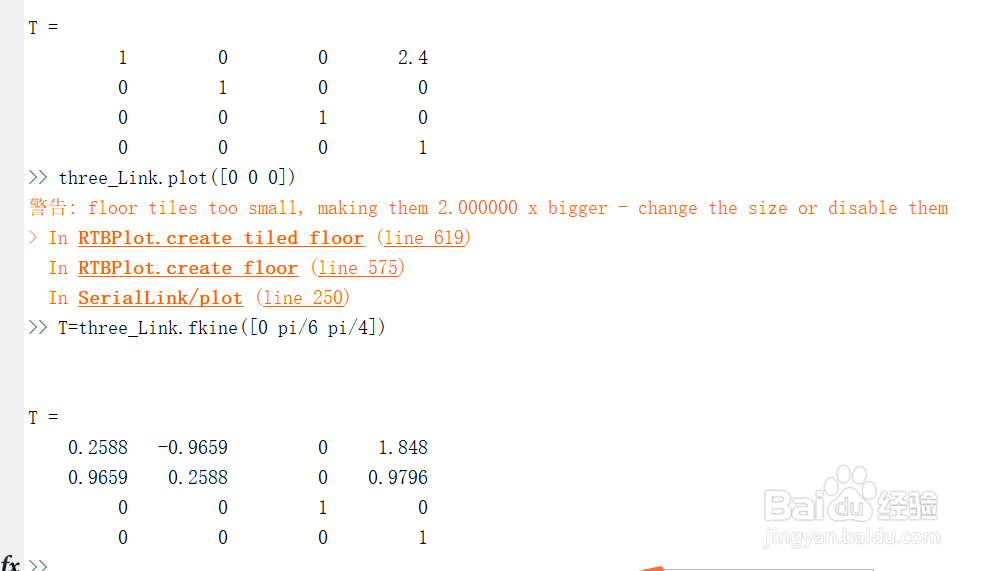
10、将变量l修改为大写L。
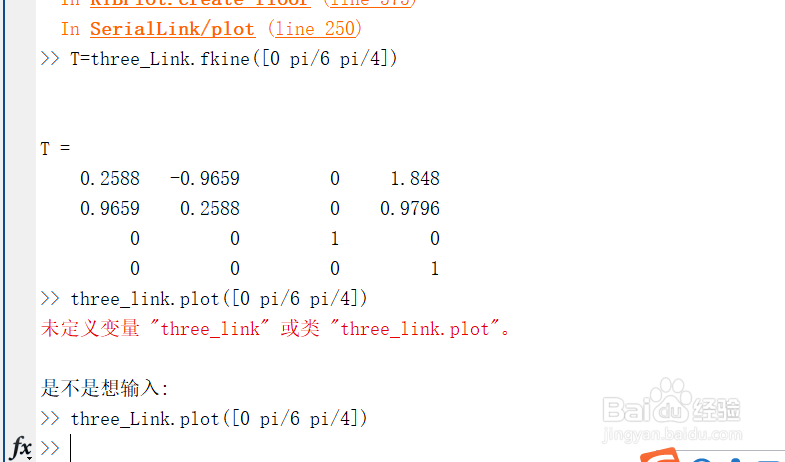
11、绘制出改变关节角度的位姿状态。

阅读量:25
阅读量:78
阅读量:122
阅读量:121
阅读量:163
1、首先在命令行窗口输入连杆Link。
2、接着复制第二行。
3、黏贴,然后将连杆长度修改为0.6。
4、输入三连杆的名字。
5、三连杆为初始状态。
6、在MATLAB上面计算出齐次坐标。
7、绘制出图形来。
8、三连杆初始状态图如下图所示。
9、改变关节角度,分别为[0 30 40]。
10、将变量l修改为大写L。
11、绘制出改变关节角度的位姿状态。